
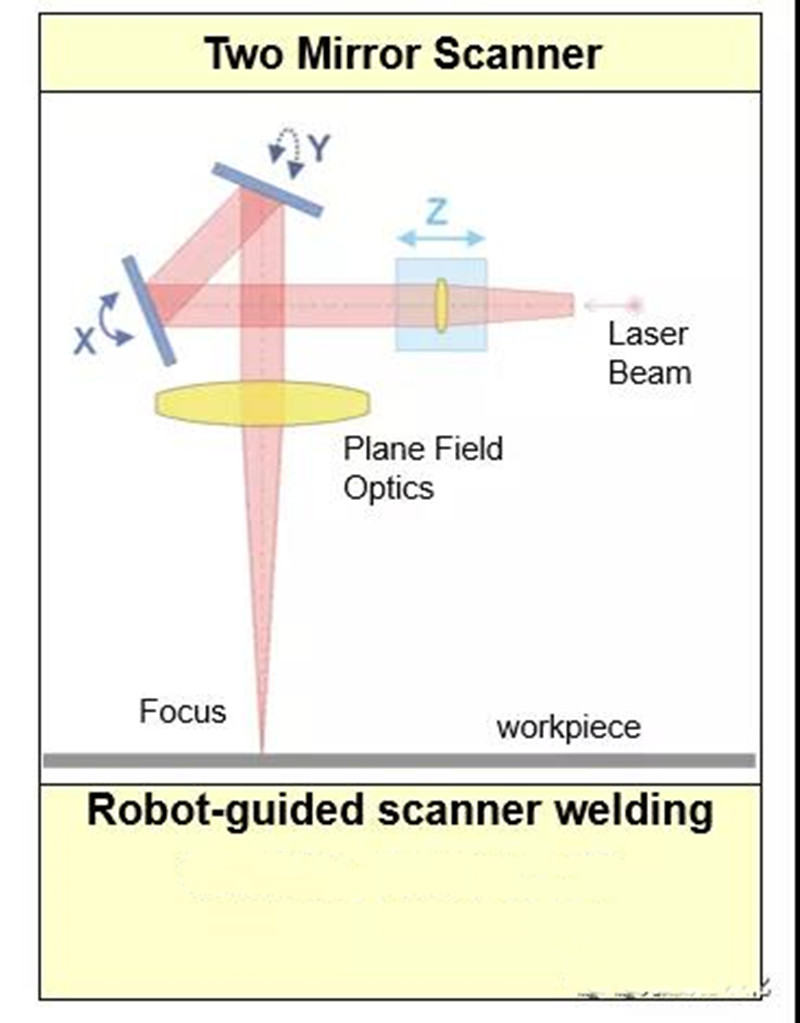
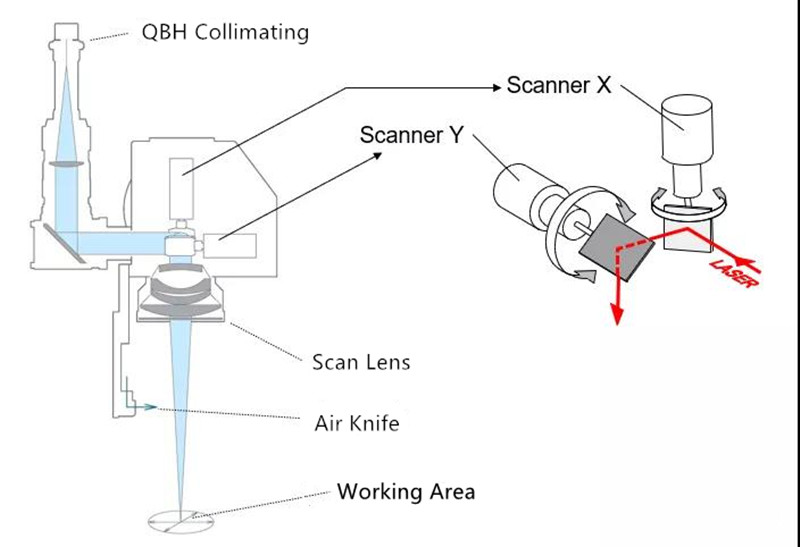
1. Awọn opo ti lesa Antivirus alurinmorin:
2. Idi ti ọlọjẹ alurinmorin le mu gbóògì ṣiṣe?
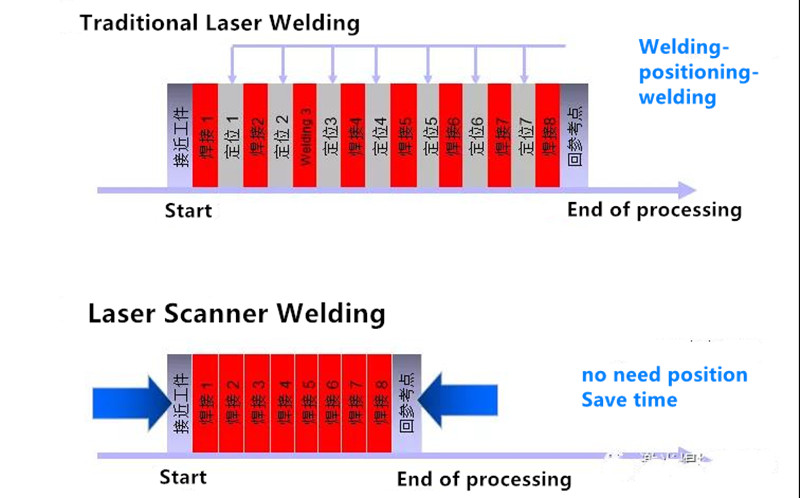
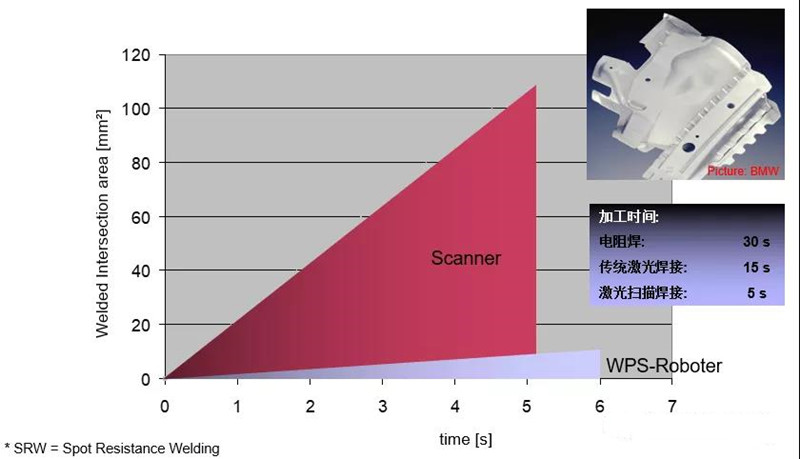
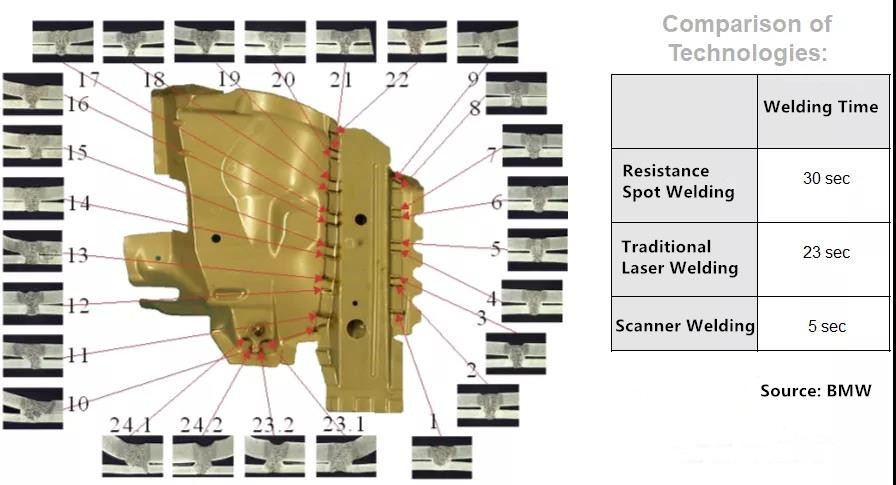
3. Afiwera ti resistance alurinmorin, ibile alurinmorin ati Antivirus alurinmorin:
4. Ipo alurinmorin adani, iṣapeye agbara apapọ: ṣiṣatunkọ ọfẹ ti pinpin \ itọsọna \ apẹrẹ.
Ti a ṣe afiwe pẹlu awọn ọna alurinmorin ibile, alurinmorin ọlọjẹ latọna jijin ni awọn anfani nla ni awọn ofin ti idoko-owo gangan, idiyele iṣẹ, aaye ilẹ ati akoko iṣelọpọ!

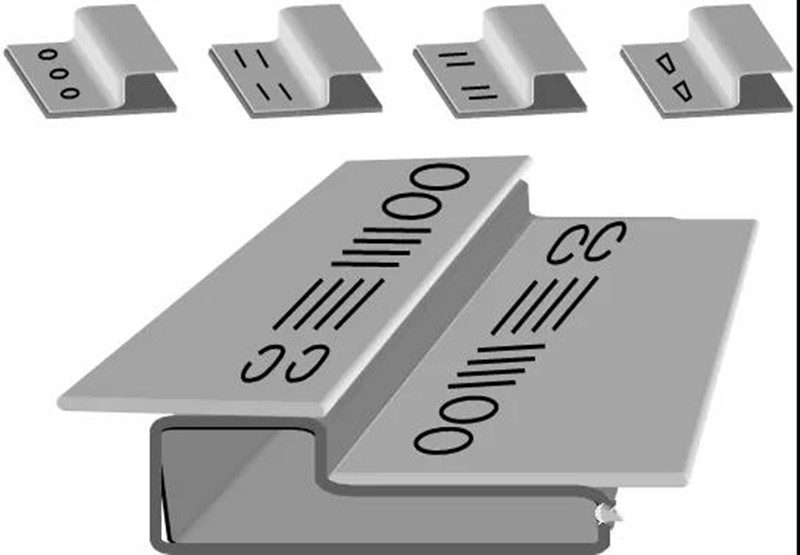
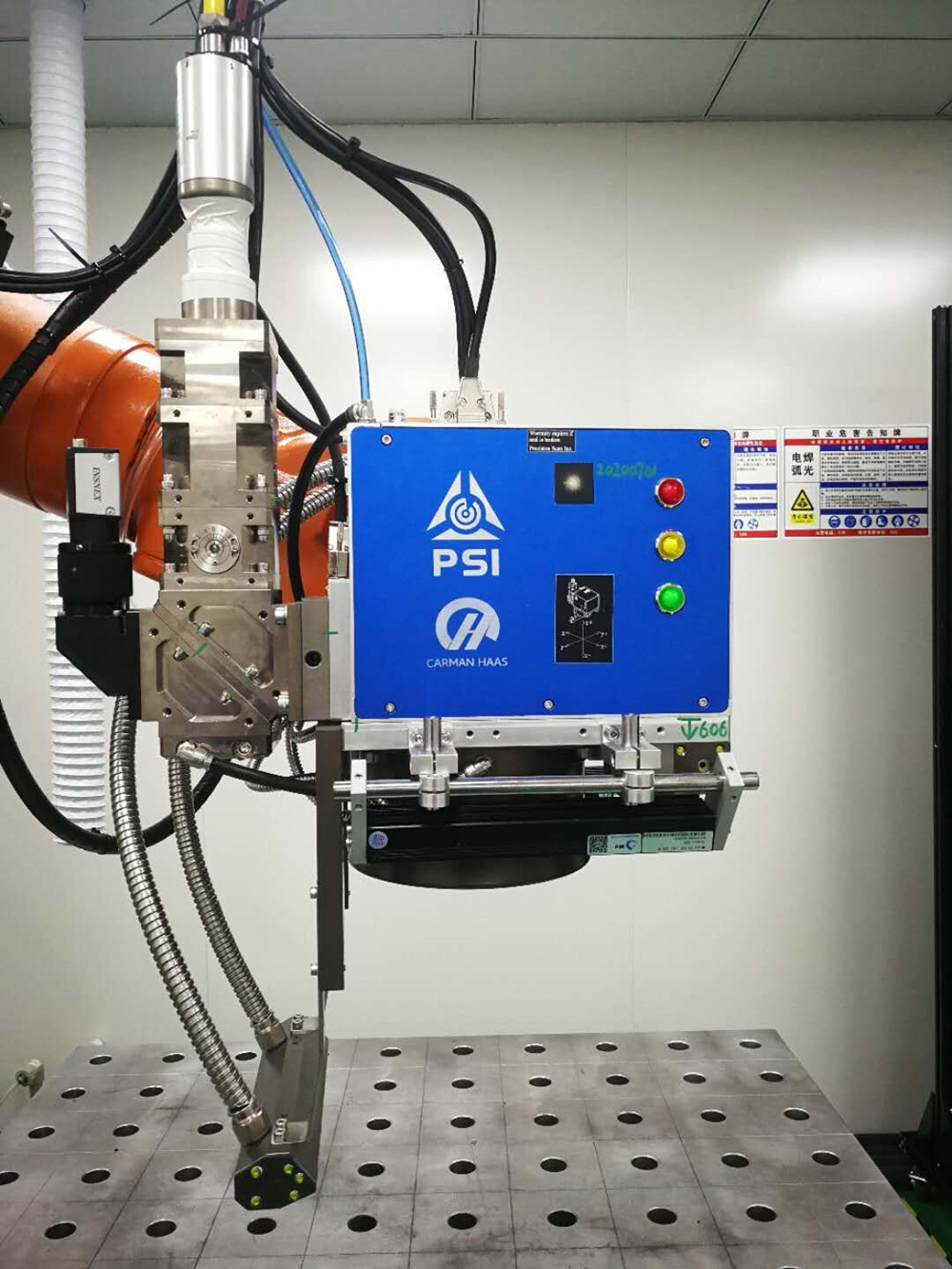
5. Ayẹwo Welding Structure (CARMANHAAS PSH30 bi apẹẹrẹ)

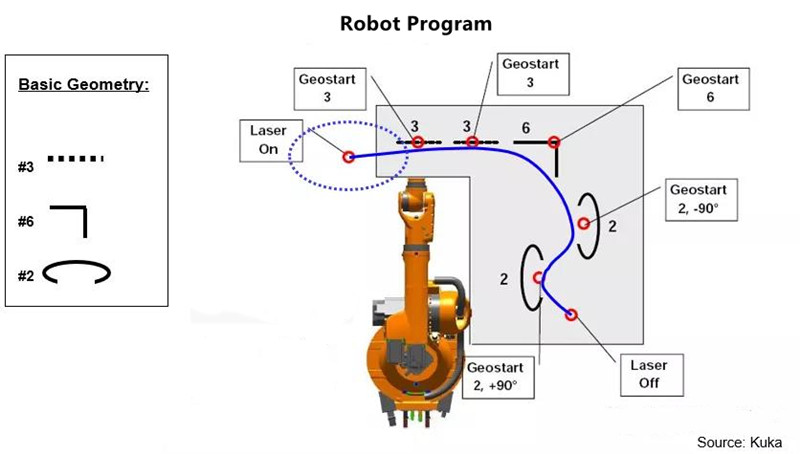
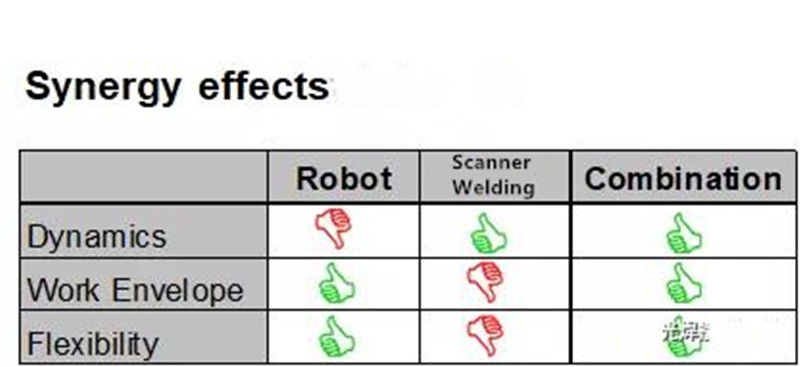
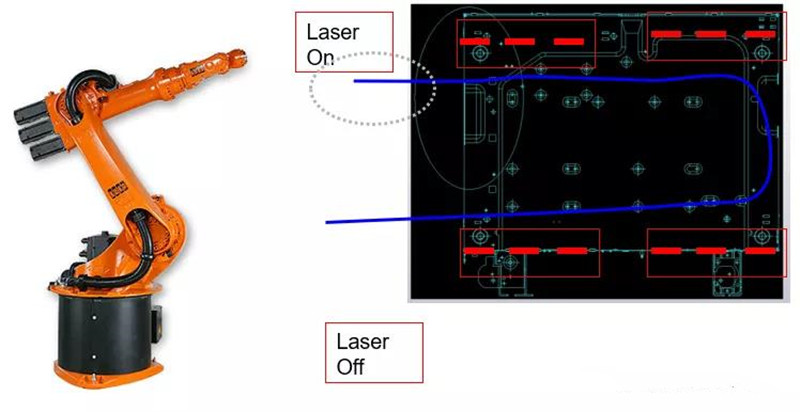
6. Amuṣiṣẹpọ ronu: Galvo scanner & Robot
7. Galvo Scanner Ọkọọkan ti apẹẹrẹ ilana:
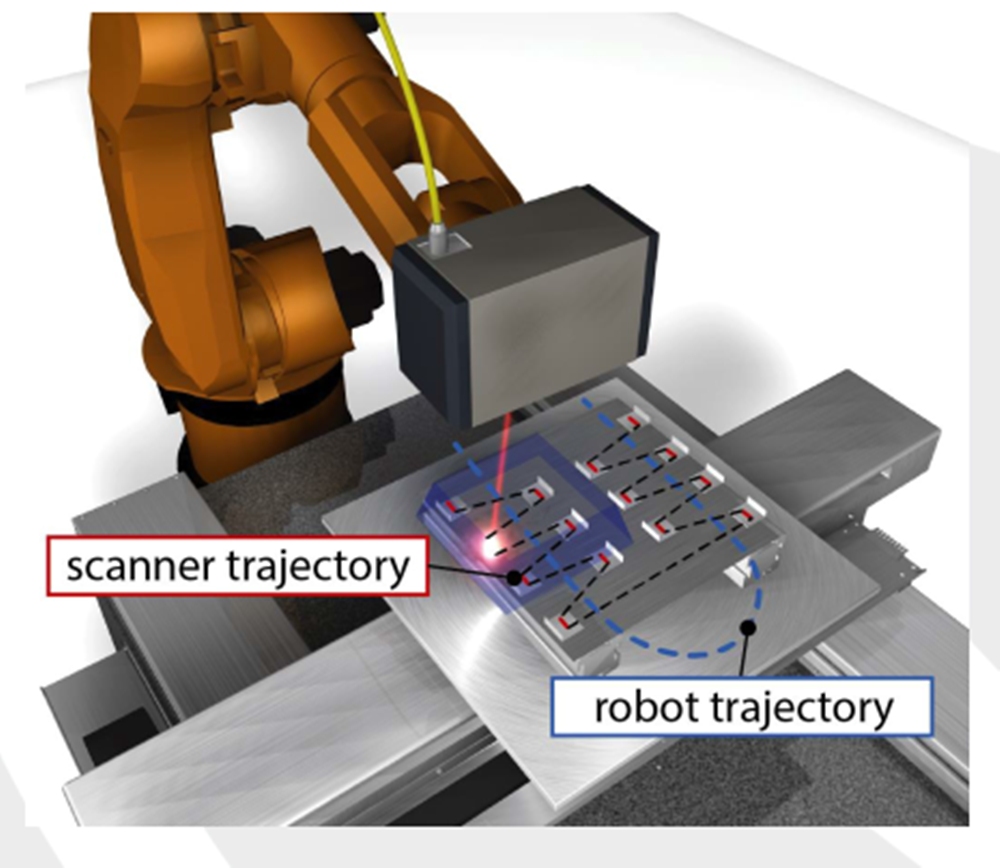
8. Galvo Scanner Ohun elo:

9. Lesa Antivirus alurinmorin se gbóògì efficiency
a.Short aye akoko Ọdọọdún ni lalailopinpin giga gbóògì ṣiṣe
b.Kekere ooru input
c.Small iparun, gun lẹnsi ṣiṣẹ ijinna
d.Awọn lẹnsi ko rọrun lati ni idọti
e.Din processing akoko ati ki o din aaye
f.Dinku awọn nọmba ti ero
g.High ẹrọ iṣamulo
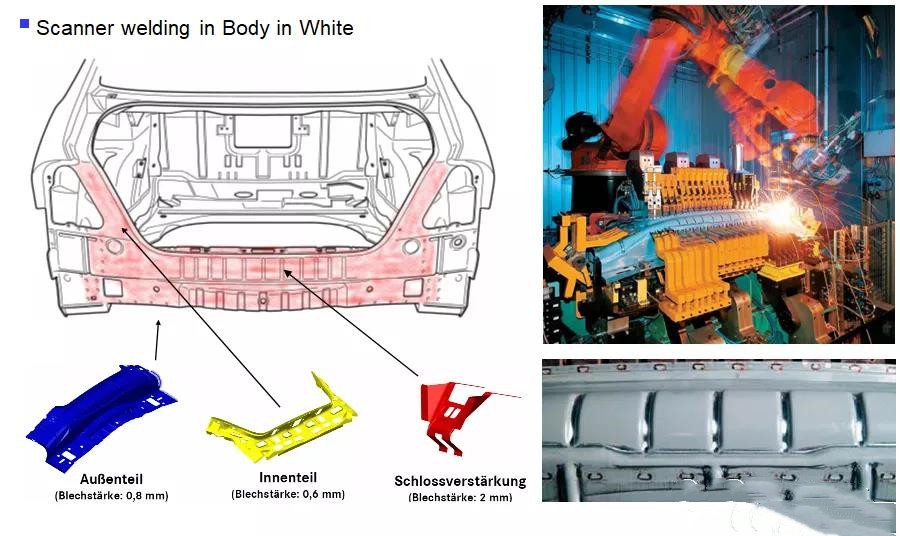
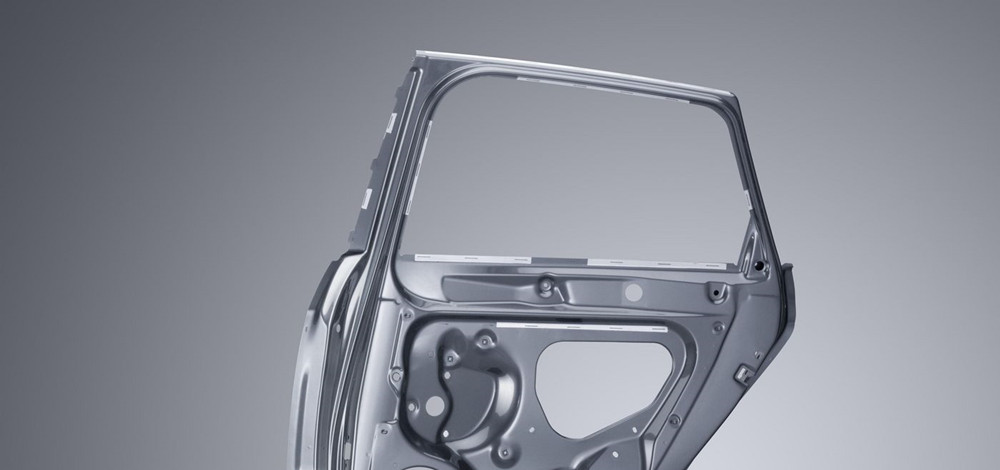
10.Mass gbóògì ohun elo
Mu dada oke bi apẹẹrẹ lati ṣe iṣiro:
Apapọ awọn welds 12 wa, ọkọọkan wọn jẹ 10mm ni ipari
1.The ipari ti a nikan weld ni 10mm, nibẹ ni o wa 12 welds ni lapapọ, ati awọn lapapọ weld ipari jẹ 120mm;
2.The robot rare merin ni igba lati bo gbogbo agbegbe;
3.The alurinmorin iyara ni o kere 5m / min, ati awọn funfun alurinmorin akoko nikan gba 1.5s;
4.The robot nilo lati gbe merin ni igba, kọọkan ronu akoko ni 1 keji, ki o si mẹrin e nilo 4 aaya;
5.Lapapọ akoko processing = akoko alurinmorin + akoko gbigbe robot | 1.5s + 4s = 5.5s.
CARMANHAAS ti ṣe adehun ni bayi si iwadii ati idagbasoke ti Alurinmorin Batiri Agbara, pẹlu Batiri Square, Batiri Soft Pack ati ohun elo batter Cylindrical. Eto Alurinmorin Scanner wa le ṣee lo fun Ile-iṣẹ EV bii Litiumu batiri Alurinmorin, Stator Motor Welding, Copper Hairpin Welding ati awọn ohun elo miiran ti o dara julọ ni didara iṣelọpọ kilasi ni idiyele ọrọ-aje.

Akoko ifiweranṣẹ: Jul-11-2022